Go内存分配那些事,就这么简单!
新老朋友好久不见,我是大彬,这篇文章准备了很久,不是在拖延,而是中间做了一些其他事情,耽搁了一些。
这篇文章主要介绍Go内存分配和Go内存管理,会轻微涉及内存申请和释放,以及Go垃圾回收。
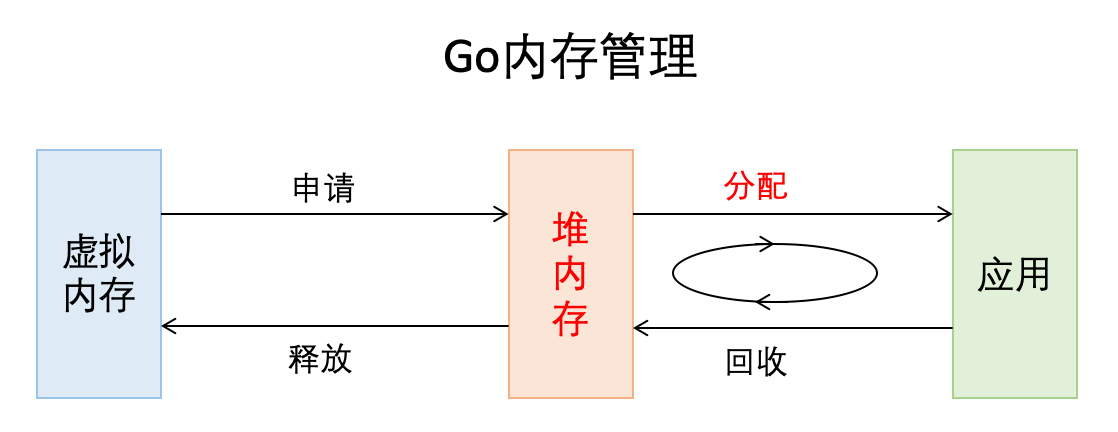
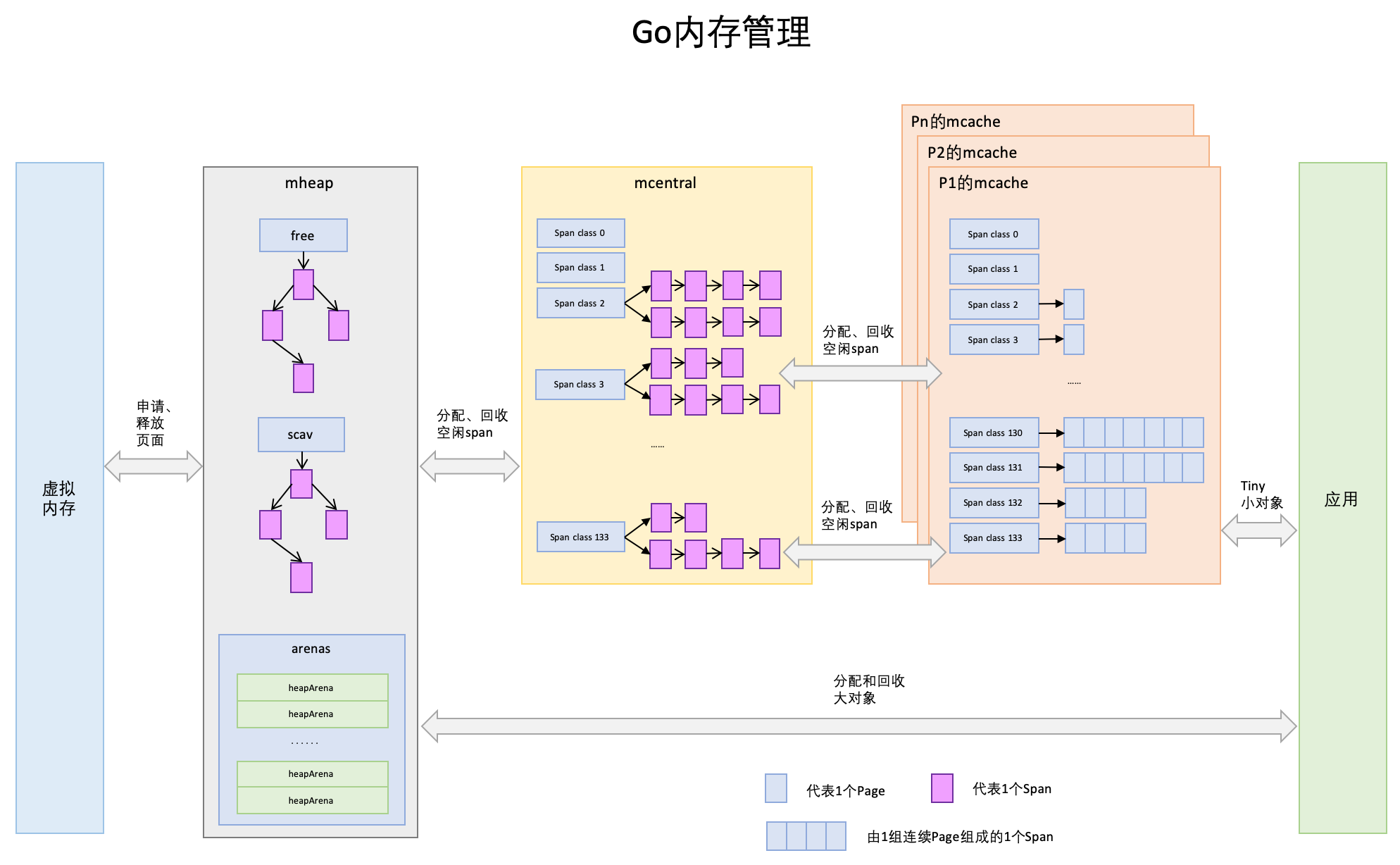
从非常宏观的角度看,Go的内存管理就是下图这个样子,我们今天主要关注其中标红的部分。
友情提醒:
文章有点长,建议先收藏,后阅读,绝对是学习内存管理的好资料。
本文基于go1.11.2,不同版本Go的内存管理可能存在差别,比如1.9与1.11的mheap定义就是差别比较大的,后续看源码的时候,请注意你的go版本,但无论你用哪个go版本,这都是一个优秀的资料,因为内存管理的思想和框架始终未变。
Go这门语言抛弃了C/C++中的开发者管理内存的方式:主动申请与主动释放,增加了逃逸分析和GC,将开发者从内存管理中释放出来,让开发者有更多的精力去关注软件设计,而不是底层的内存问题。这是Go语言成为高生产力语言的原因之一。
我们不需要精通内存的管理,因为它确实很复杂,但掌握内存的管理,可以让你写出更高质量的代码,另外,还能助你定位Bug。
这篇文章采用层层递进的方式,依次会介绍关于存储的基本知识,Go内存管理的“前辈”TCMalloc,然后是Go的内存管理和分配,最后是总结。这么做的目的是,希望各位能通过全局的认识和思考,拥有更好的编码思维和架构思维。
最后,这不是一篇源码分析文章,因为Go源码分析的文章已经有很多了,这些源码文章能够帮助你去学习具体的工程实践和奇淫巧计了,文章的末尾会推荐一些优秀文章,如果你对内存感兴趣,建议每一篇都去看一下,挑出自己喜欢的,多花时间研究下。
1. 存储基础知识回顾
这部分我们简单回顾一下计算机存储体系、虚拟内存、栈和堆,以及堆内存的管理,这部分内容对理解和掌握Go内存管理比较重要,建议忘记或不熟悉的朋友不要跳过。
存储金字塔
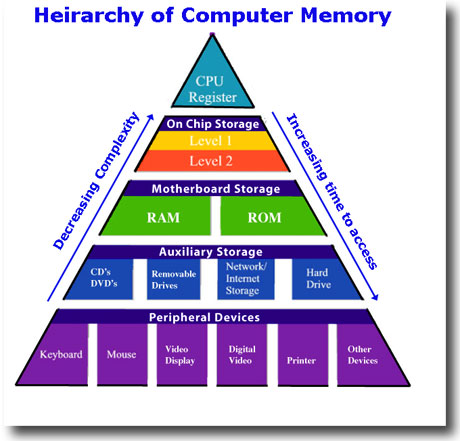
这幅图表达了计算机的存储体系,从上至下依次是:
- CPU寄存器
- Cache
- 内存
- 硬盘等辅助存储设备
- 鼠标等外接设备
从上至下,访问速度越来越慢,访问时间越来越长。
你有没有思考过下面2个简单的问题,如果没有不妨想想:
- 如果CPU直接访问硬盘,CPU能充分利用吗?
- 如果CPU直接访问内存,CPU能充分利用吗?
CPU速度很快,但硬盘等持久存储很慢,如果CPU直接访问磁盘,磁盘可以拉低CPU的速度,机器整体性能就会低下,为了弥补这2个硬件之间的速率差异,所以在CPU和磁盘之间增加了比磁盘快很多的内存。
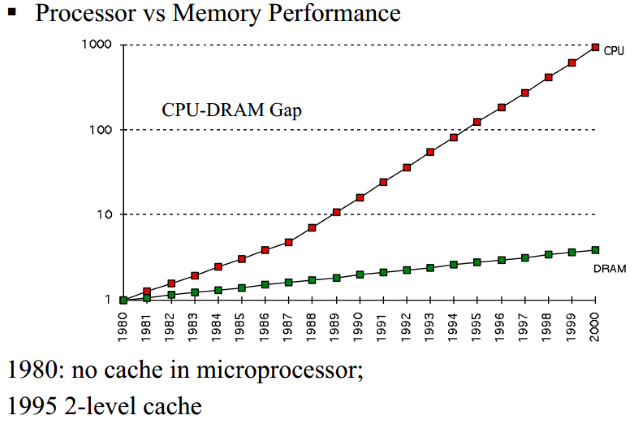
然而,CPU跟内存的速率也不是相同的,从上图可以看到,CPU的速率提高的很快(摩尔定律),然而内存速率增长的很慢,虽然CPU的速率现在增加的很慢了,但是内存的速率也没增加多少,速率差距很大,从1980年开始CPU和内存速率差距在不断拉大,为了弥补这2个硬件之间的速率差异,所以在CPU跟内存之间增加了比内存更快的Cache,Cache是内存数据的缓存,可以降低CPU访问内存的时间。
不要以为有了Cache就万事大吉了,CPU的速率还在不断增大,Cache也在不断改变,从最初的1级,到后来的2级,到当代的3级Cache,*(有兴趣看cache历史)*。
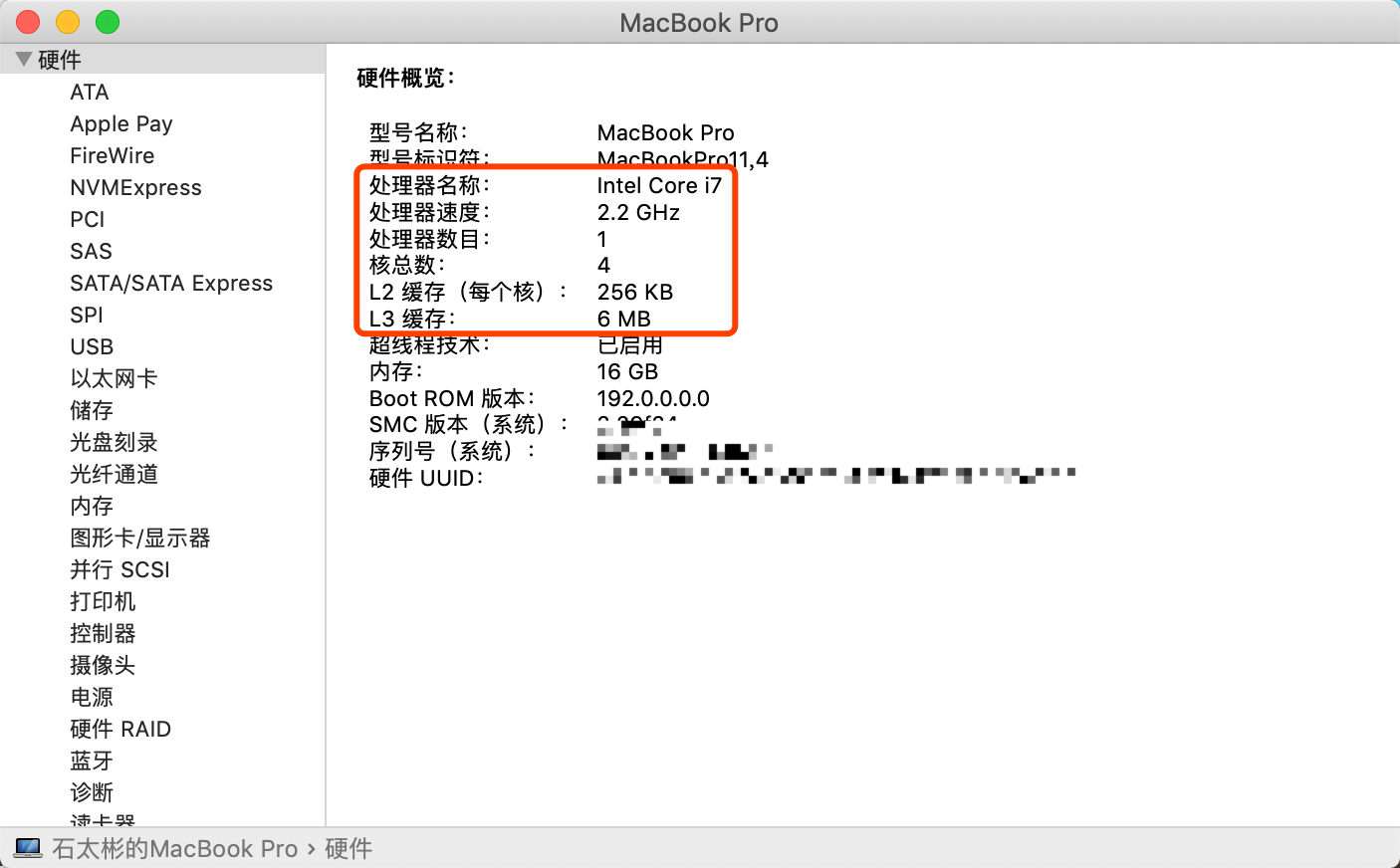
三级Cache分别是L1、L2、L3,它们的速率是三个不同的层级,L1速率最快,与CPU速率最接近,是RAM速率的100倍,L2速率就降到了RAM的25倍,L3的速率更靠近RAM的速率。
看到这了,你有没有Get到整个存储体系的分层设计?自顶向下,速率越来越低,访问时间越来越长,从磁盘到CPU寄存器,上一层都可以看做是下一层的缓存。
看了分层设计,我们看一下内存,毕竟我们是介绍内存管理的文章。
虚拟内存
虚拟内存是当代操作系统必备的一项重要功能了,它向进程屏蔽了底层了RAM和磁盘,并向进程提供了远超物理内存大小的内存空间。我们看一下虚拟内存的分层设计。
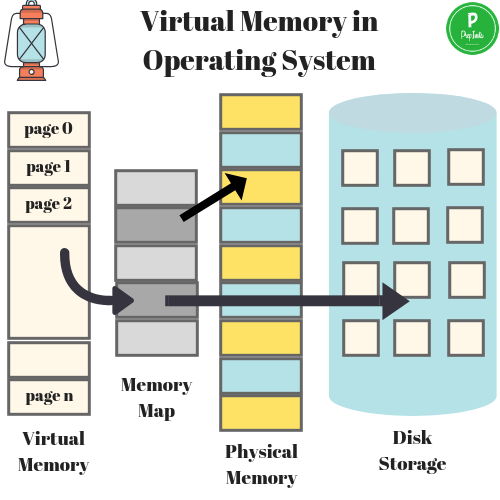
上图展示了某进程访问数据,当Cache没有命中的时候,访问虚拟内存获取数据的过程。
访问内存,实际访问的是虚拟内存,虚拟内存通过页表查看,当前要访问的虚拟内存地址,是否已经加载到了物理内存,如果已经在物理内存,则取物理内存数据,如果没有对应的物理内存,则从磁盘加载数据到物理内存,并把物理内存地址和虚拟内存地址更新到页表。
有没有Get到:物理内存就是磁盘存储缓存层。
另外,在没有虚拟内存的时代,物理内存对所有进程是共享的,多进程同时访问同一个物理内存存在并发访问问题。引入虚拟内存后,每个进程都要各自的虚拟内存,内存的并发访问问题的粒度从多进程级别,可以降低到多线程级别。
栈和堆
我们现在从虚拟内存,再进一层,看虚拟内存中的栈和堆,也就是进程对内存的管理。
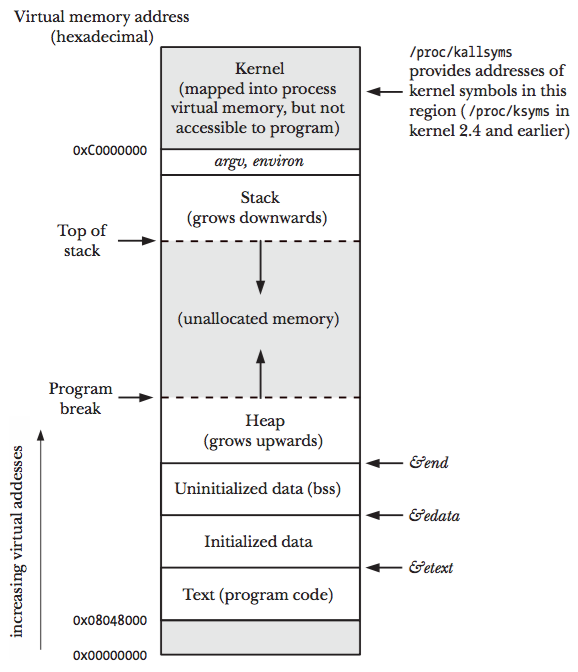
上图展示了一个进程的虚拟内存划分,代码中使用的内存地址都是虚拟内存地址,而不是实际的物理内存地址。栈和堆只是虚拟内存上2块不同功能的内存区域:
栈在高地址,从高地址向低地址增长。
堆在低地址,从低地址向高地址增长。
栈和堆相比有这么几个好处:
- 栈的内存管理简单,分配比堆上快。
- 栈的内存不需要回收,而堆需要,无论是主动free,还是被动的垃圾回收,这都需要花费额外的CPU。
- 栈上的内存有更好的局部性,堆上内存访问就不那么友好了,CPU访问的2块数据可能在不同的页上,CPU访问数据的时间可能就上去了。
堆内存管理
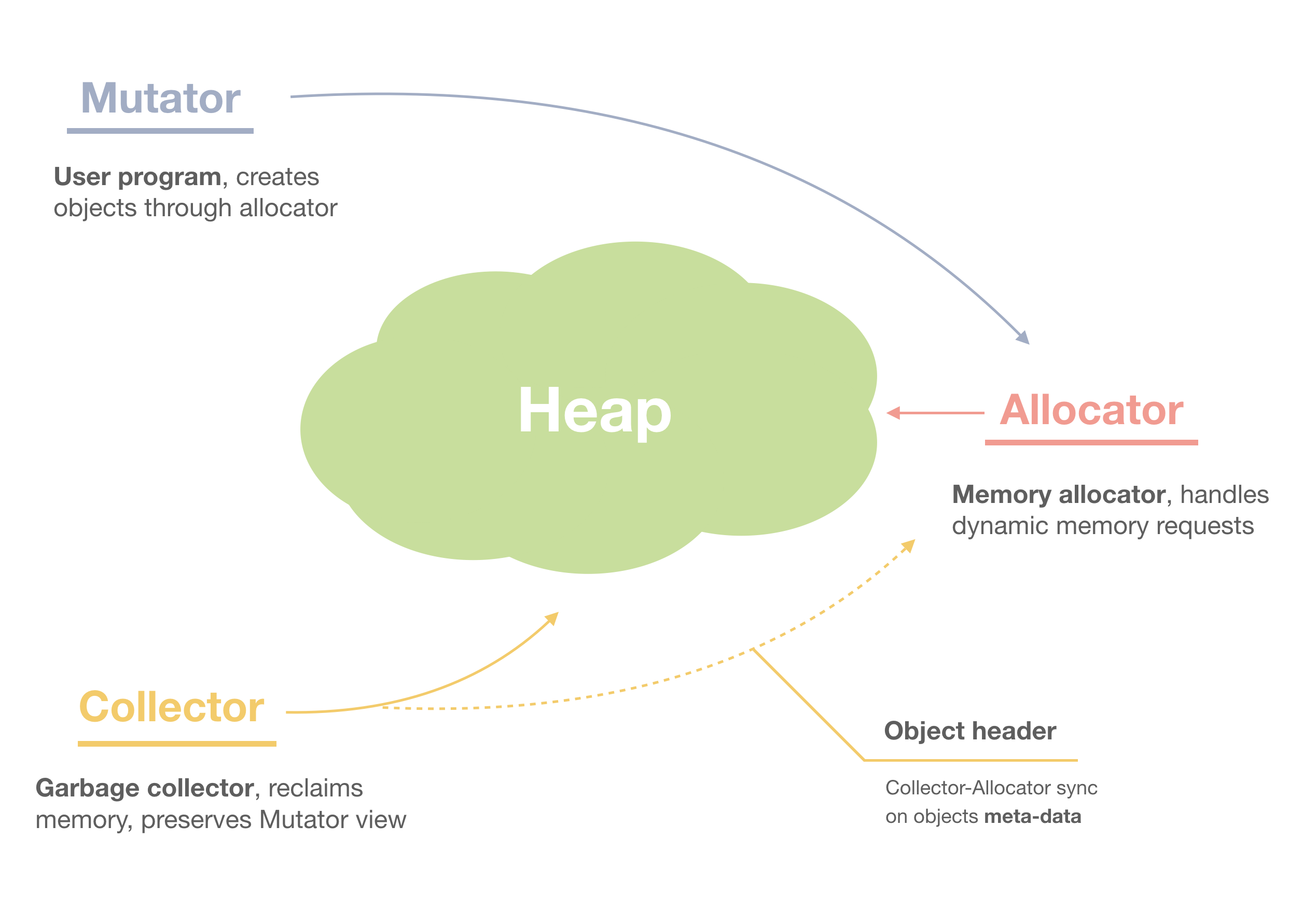
我们再进一层,当我们说内存管理的时候,主要是指堆内存的管理,因为栈的内存管理不需要程序去操心。这小节看下堆内存管理干的是啥,如上图所示主要是3部分:分配内存块,回收内存块和组织内存块。
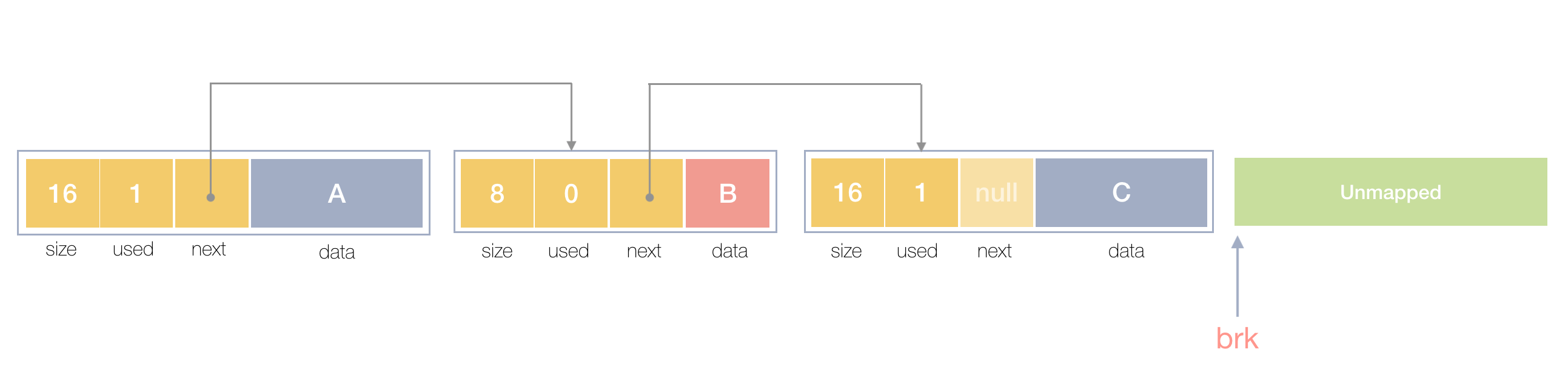
在一个最简单的内存管理中,堆内存最初会是一个完整的大块,即未分配内存,当来申请的时候,就会从未分配内存,分割出一个小内存块(block),然后用链表把所有内存块连接起来。需要一些信息描述每个内存块的基本信息,比如大小(size)、是否使用中(used)和下一个内存块的地址(next),内存块实际数据存储在data中。
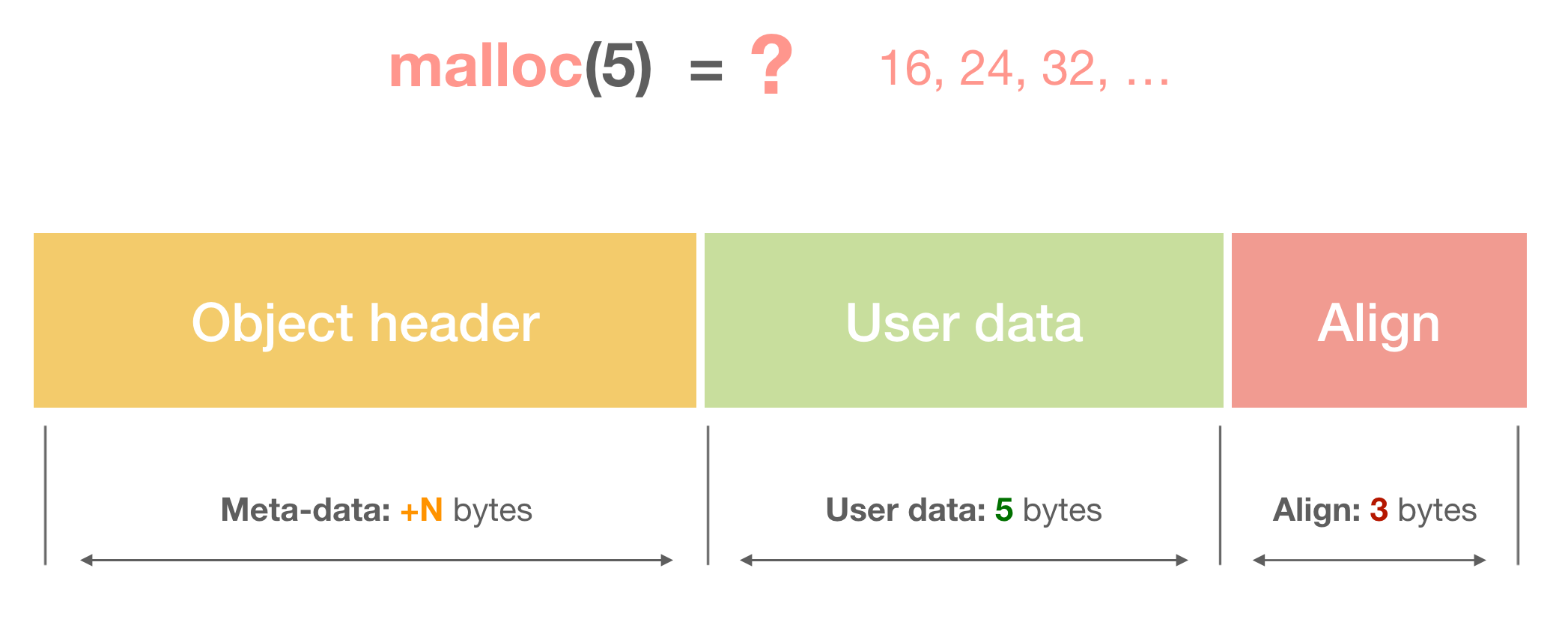
一个内存块包含了3类信息,如下图所示,元数据、用户数据和对齐字段,内存对齐是为了提高访问效率。下图申请5Byte内存的时候,就需要进行内存对齐。
释放内存实质是把使用的内存块从链表中取出来,然后标记为未使用,当分配内存块的时候,可以从未使用内存块中有先查找大小相近的内存块,如果找不到,再从未分配的内存中分配内存。
上面这个简单的设计中还没考虑内存碎片的问题,因为随着内存不断的申请和释放,内存上会存在大量的碎片,降低内存的使用率。为了解决内存碎片,可以将2个连续的未使用的内存块合并,减少碎片。
以上就是内存管理的基本思路,关于基本的内存管理,想了解更多,可以阅读这篇文章《Writing a Memory Allocator》,本节的3张图片也是来自这片文章。
2. TCMalloc
TCMalloc是Thread Cache Malloc的简称,是Go内存管理的起源,Go的内存管理是借鉴了TCMalloc,随着Go的迭代,Go的内存管理与TCMalloc不一致地方在不断扩大,但其主要思想、原理和概念都是和TCMalloc一致的,如果跳过TCMalloc直接去看Go的内存管理,也许你会似懂非懂。
掌握TCMalloc的理念,无需去关注过多的源码细节,就可以为掌握Go的内存管理打好基础,基础打好了,后面知识才扎实。
在Linux里,其实有不少的内存管理库,比如glibc的ptmalloc,FreeBSD的jemalloc,Google的tcmalloc等等,为何会出现这么多的内存管理库?本质都是在多线程编程下,追求更高内存管理效率:更快的分配是主要目的。
那如何更快的分配内存?
我们前面提到:
引入虚拟内存后,让内存的并发访问问题的粒度从多进程级别,降低到多线程级别。
这是更快分配内存的第一个层次。
同一进程的所有线程共享相同的内存空间,他们申请内存时需要加锁,如果不加锁就存在同一块内存被2个线程同时访问的问题。
TCMalloc的做法是什么呢?为每个线程预分配一块缓存,线程申请小内存时,可以从缓存分配内存,这样有2个好处:
- 为线程预分配缓存需要进行1次系统调用,后续线程申请小内存时,从缓存分配,都是在用户态执行,没有系统调用,缩短了内存总体的分配和释放时间,这是快速分配内存的第二个层次。
- 多个线程同时申请小内存时,从各自的缓存分配,访问的是不同的地址空间,无需加锁,把内存并发访问的粒度进一步降低了,这是快速分配内存的第三个层次。
基本原理
下面就简单介绍下TCMalloc,细致程度够我们理解Go的内存管理即可。
声明:我没有研究过TCMalloc,以下介绍根据TCMalloc官方资料和其他博主资料总结而来,错误之处请朋友告知我。

结合上图,介绍TCMalloc的几个重要概念:
- Page:操作系统对内存管理以页为单位,TCMalloc也是这样,只不过TCMalloc里的Page大小与操作系统里的大小并不一定相等,而是倍数关系。《TCMalloc解密》里称x64下Page大小是8KB。
- Span:一组连续的Page被称为Span,比如可以有2个页大小的Span,也可以有16页大小的Span,Span比Page高一个层级,是为了方便管理一定大小的内存区域,Span是TCMalloc中内存管理的基本单位。
- ThreadCache:每个线程各自的Cache,一个Cache包含多个空闲内存块链表,每个链表连接的都是内存块,同一个链表上内存块的大小是相同的,也可以说按内存块大小,给内存块分了个类,这样可以根据申请的内存大小,快速从合适的链表选择空闲内存块。由于每个线程有自己的ThreadCache,所以ThreadCache访问是无锁的。
- CentralCache:是所有线程共享的缓存,也是保存的空闲内存块链表,链表的数量与ThreadCache中链表数量相同,当ThreadCache内存块不足时,可以从CentralCache取,当ThreadCache内存块多时,可以放回CentralCache。由于CentralCache是共享的,所以它的访问是要加锁的。
- PageHeap:PageHeap是堆内存的抽象,PageHeap存的也是若干链表,链表保存的是Span,当CentralCache没有内存的时,会从PageHeap取,把1个Span拆成若干内存块,添加到对应大小的链表中,当CentralCache内存多的时候,会放回PageHeap。如下图,分别是1页Page的Span链表,2页Page的Span链表等,最后是large span set,这个是用来保存中大对象的。毫无疑问,PageHeap也是要加锁的。

上文提到了小、中、大对象,Go内存管理中也有类似的概念,我们瞄一眼TCMalloc的定义:
- 小对象大小:0~256KB
- 中对象大小:257~1MB
- 大对象大小:>1MB
小对象的分配流程:ThreadCache -> CentralCache -> HeapPage,大部分时候,ThreadCache缓存都是足够的,不需要去访问CentralCache和HeapPage,无锁分配加无系统调用,分配效率是非常高的。
中对象分配流程:直接在PageHeap中选择适当的大小即可,128 Page的Span所保存的最大内存就是1MB。
大对象分配流程:从large span set选择合适数量的页面组成span,用来存储数据。
通过本节的介绍,你应当对TCMalloc主要思想有一定了解了,我建议再回顾一下上面的内容。
本节图片皆来自《TCMalloc解密》,图片版权归原作者所有。
精彩文章推荐
本文对于TCMalloc的介绍并不多,重要的是3个快速分配内存的层次,如果想了解更多,可阅读下面文章。
必读,通过这篇你能掌握TCMalloc的原理和性能,对掌握Go的内存管理有非常大的帮助,虽然如今Go的内存管理与TCMalloc已经相差很大,但是,这是Go内存管理的起源和“大道”,这篇文章顶看十几篇Go内存管理的文章。
可选,异常详细,包含大量精美图片,看完得花小时级别,理解就需要更多时间了,看完这篇不需要看其他TCMalloc的文章了。
可选,算是TCMalloc的文档的中文版,多数是从英文版翻译过来的,如果你英文不好,看看。
3. Go内存管理
前面铺垫了那么多,终于到了本文核心的地方。前面的铺垫不是不重要,相反它们很重要,Go语言内存管理源自前面的基础知识和内存管理思维,如果你跳过了前面的内容,建议你回头看一看,它可以帮助你更好的掌握Go内存管理。
前文提到Go内存管理源自TCMalloc,但它比TCMalloc还多了2件东西:逃逸分析和垃圾回收,这是2项提高生产力的绝佳武器。
这一大章节,我们先介绍Go内存管理和Go内存分配,最后涉及一点垃圾回收和内存释放。
Go内存管理的基本概念
前面计算机基础知识回顾,是一种自上而下,从宏观到微观的介绍方式,把目光引入到今天的主题。
Go内存管理的许多概念在TCMalloc中已经有了,含义是相同的,只是名字有一些变化。先给大家上一幅宏观的图,借助图一起来介绍。
Page
与TCMalloc中的Page相同,x64下1个Page的大小是8KB。上图的最下方,1个浅蓝色的长方形代表1个Page。
Span
与TCMalloc中的Span相同,Span是内存管理的基本单位,代码中为mspan,一组连续的Page组成1个Span,所以上图一组连续的浅蓝色长方形代表的是一组Page组成的1个Span,另外,1个淡紫色长方形为1个Span。
mcache
mcache与TCMalloc中的ThreadCache类似,mcache保存的是各种大小的Span,并按Span class分类,小对象直接从mcache分配内存,它起到了缓存的作用,并且可以无锁访问。
但mcache与ThreadCache也有不同点,TCMalloc中是每个线程1个ThreadCache,Go中是每个P拥有1个mcache,因为在Go程序中,当前最多有GOMAXPROCS个线程在用户态运行,所以最多需要GOMAXPROCS个mcache就可以保证各线程对mcache的无锁访问,线程的运行又是与P绑定的,把mcache交给P刚刚好。
mcentral
mcentral与TCMalloc中的CentralCache类似,是所有线程共享的缓存,需要加锁访问,它按Span class对Span分类,串联成链表,当mcache的某个级别Span的内存被分配光时,它会向mcentral申请1个当前级别的Span。
但mcentral与CentralCache也有不同点,CentralCache是每个级别的Span有1个链表,mcache是每个级别的Span有2个链表,这和mcache申请内存有关,稍后我们再解释。
mheap
mheap与TCMalloc中的PageHeap类似,它是堆内存的抽象,把从OS申请出的内存页组织成Span,并保存起来。当mcentral的Span不够用时会向mheap申请,mheap的Span不够用时会向OS申请,向OS的内存申请是按页来的,然后把申请来的内存页生成Span组织起来,同样也是需要加锁访问的。
但mheap与PageHeap也有不同点:mheap把Span组织成了树结构,而不是链表,并且还是2棵树,然后把Span分配到heapArena进行管理,它包含地址映射和span是否包含指针等位图,这样做的主要原因是为了更高效的利用内存:分配、回收和再利用。
大小转换
除了以上内存块组织概念,还有几个重要的大小概念,一定要拿出来讲一下,不要忽视他们的重要性,他们是内存分配、组织和地址转换的基础。
- object size:代码里简称
size,指申请内存的对象大小。 - size class:代码里简称
class,它是size的级别,相当于把size归类到一定大小的区间段,比如size[1,8]属于size class 1,size(8,16]属于size class 2。 - span class:指span的级别,但span class的大小与span的大小并没有正比关系。span class主要用来和size class做对应,1个size class对应2个span class,2个span class的span大小相同,只是功能不同,1个用来存放包含指针的对象,一个用来存放不包含指针的对象,不包含指针对象的Span就无需GC扫描了。
- num of page:代码里简称
npage,代表Page的数量,其实就是Span包含的页数,用来分配内存。
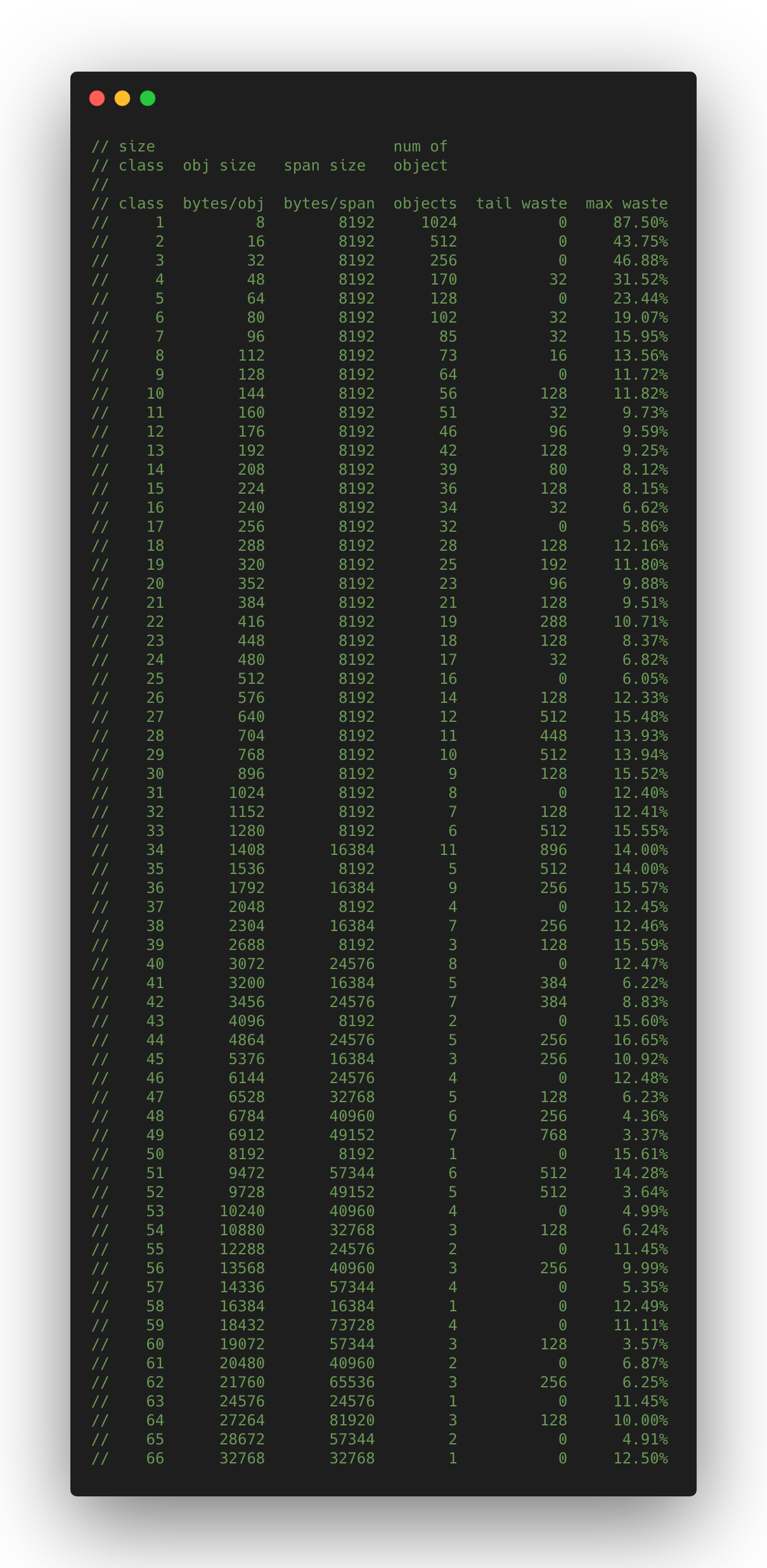
在介绍这几个大小之间的换算前,我们得先看下图这个表,这个表决定了映射关系。
最上面2行是我手动加的,前3列分别是size class,object size和span size,根据这3列做size、size class和num of page之间的转换。
仔细看一遍这个表,再向下看转换是如何实现的。
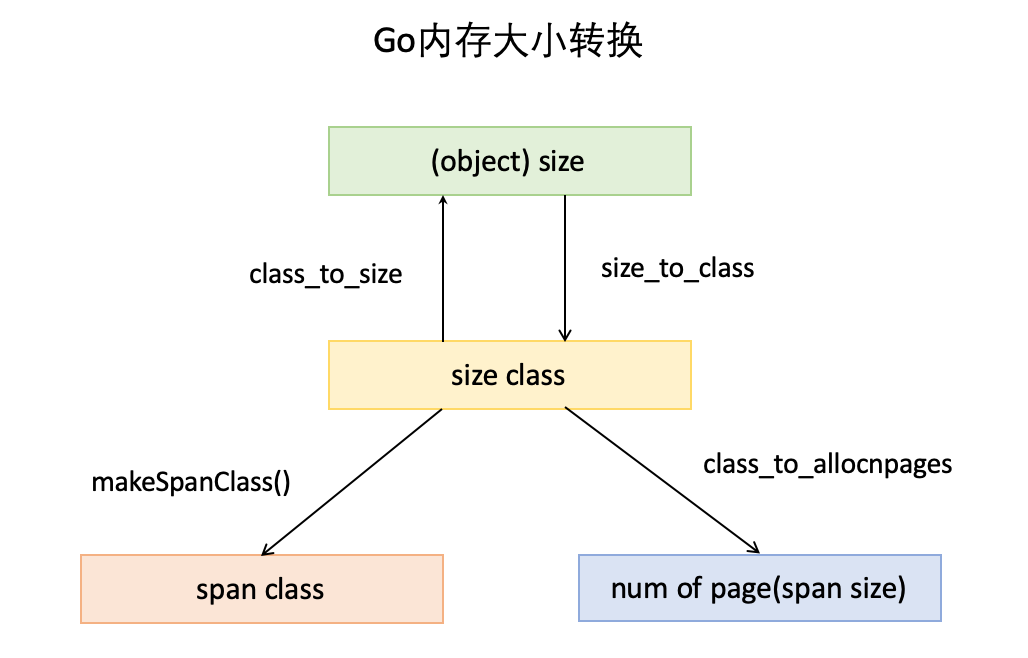
在Go内存大小转换那幅图中已经标记各大小之间的转换,分别是数组:class_to_size,size_to_class*和class_to_allocnpages,这3个数组内容,就是跟上表的映射关系匹配的。比如class_to_size,从上表看class 1对应的保存对象大小为8,所以class_to_size[1]=8,span大小为8192Byte,即8KB,为1页,所以class_to_allocnpages[1]=1。
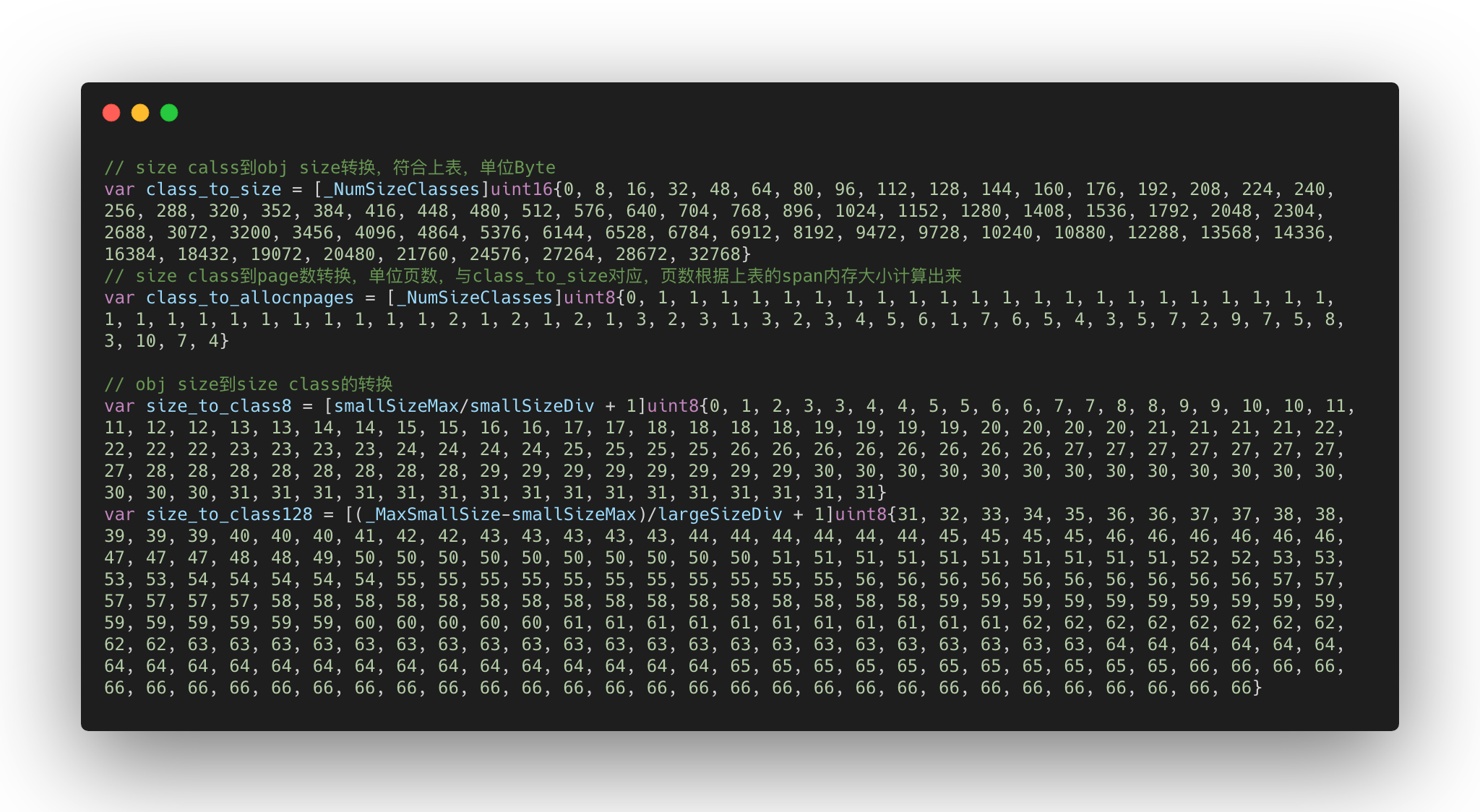
为何不使用函数计算各种转换,而是写成数组?
有1个很重要的原因:空间换时间。你如果仔细观察了,上表中的转换,并不能通过简单的公式进行转换,比如size和size class的关系,并不是正比的。这些数据是使用较复杂的公式计算出来的,公式在makesizeclass.go中,这其中存在指数运算与for循环,造成每次大小转换的时间复杂度为O(N*2^N)。另外,对一个程序而言,内存的申请和管理操作是很多的,如果不能快速完成,就是非常的低效。把以上大小转换写死到数组里,做到了把大小转换的时间复杂度直接降到O(1)。
其他转换表字段
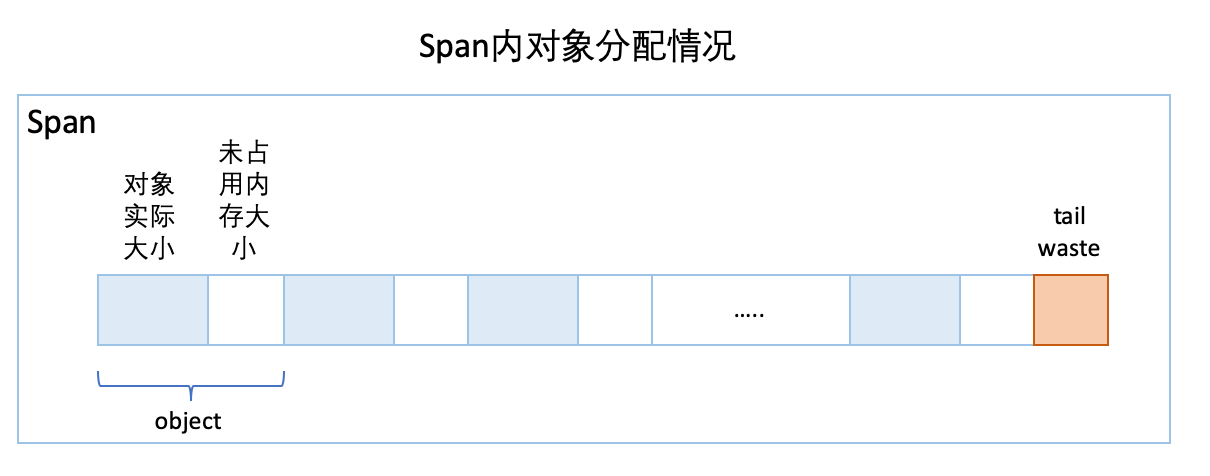
第4列num of objects代表是当前size class级别的Span可以保存多少对象数量,第5列tail waste是span%obj计算的结果,因为span的大小并不一定是对象大小的整数倍。
最后一列max waste代表最大浪费的内存百分比,计算方法在printComment函数中:
1 | func printComment(w io.Writer, classes []class) { |
Span最浪费内存的场景是:Span内的每一个对象空间保存的对象,实际占用内存是前一个class中对象的大小加1,这样无法占用低一级的Span。一个对象空间未被占用的内存就被浪费了,所以一个Span内对象空间所浪费的内存为:所有对象空间浪费的内存之和+tail waste。
((c.size - (preSize+1)) * objects + tailWaste) / spanSize
感谢foobar的提醒max waste的计算。
Go内存分配
涉及的概念已经讲完了,我们看下Go内存分配原理。
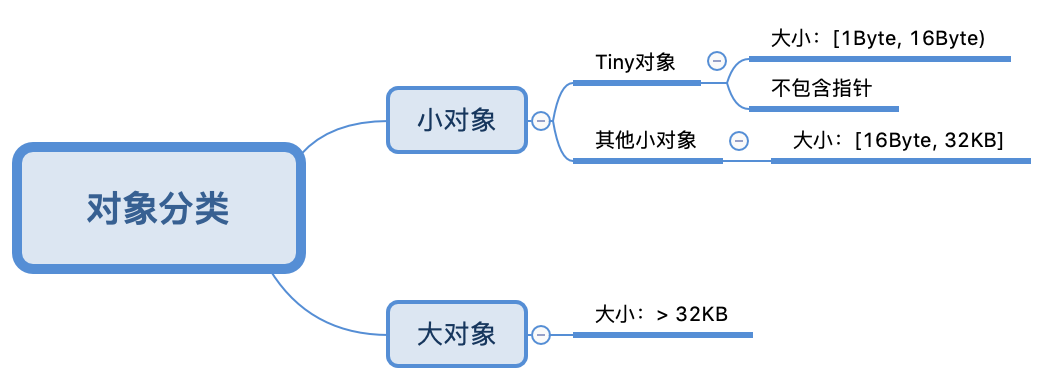
Go中的内存分类并不像TCMalloc那样分成小、中、大对象,但是它的小对象里又细分了一个Tiny对象,Tiny对象指大小在1Byte到16Byte之间并且不包含指针的对象。小对象和大对象只用大小划定,无其他区分。
小对象是在mcache中分配的,而大对象是直接从mheap分配的,从小对象的内存分配看起。
小对象分配
大小转换这一小节,我们介绍了转换表,size class从1到66共66个,代码中_NumSizeClasses=67代表了实际使用的size class数量,即67个,从0到66,size class 0实际并未使用到。
上文提到1个size class对应2个span class:
1 | numSpanClasses = _NumSizeClasses * 2 |
numSpanClasses为span class的数量为134个,所以span class的下标是从0到133,所以上图中mcache标注了的span class是,span class 0到span class 133。每1个span class都指向1个span,也就是mcache最多有134个span。
为对象寻找span
寻找span的流程如下:
- 计算对象所需内存大小size
- 根据size到size class映射,计算出所需的size class
- 根据size class和对象是否包含指针计算出span class
- 获取该span class指向的span。
以分配一个不包含指针的,大小为24Byte的对象为例。
根据映射表:
1 | // class bytes/obj bytes/span objects tail waste max waste |
size class 3,它的对象大小范围是(16,32]Byte,24Byte刚好在此区间,所以此对象的size class为3。
Size class到span class的计算如下:
1 | // noscan为true代表对象不包含指针 |
所以,对应的span class为:
1 | span class = 3 << 1 | 1 = 7 |
所以该对象需要的是span class 7指向的span。
从span分配对象空间
Span可以按对象大小切成很多份,这些都可以从映射表上计算出来,以size class 3对应的span为例,span大小是8KB,每个对象实际所占空间为32Byte,这个span就被分成了256块,可以根据span的起始地址计算出每个对象块的内存地址。
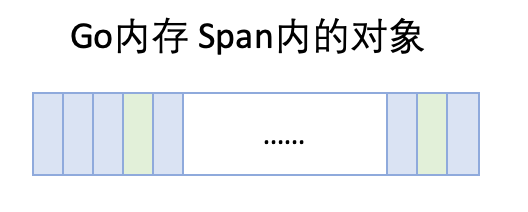
随着内存的分配,span中的对象内存块,有些被占用,有些未被占用,比如上图,整体代表1个span,蓝色块代表已被占用内存,绿色块代表未被占用内存。
当分配内存时,只要快速找到第一个可用的绿色块,并计算出内存地址即可,如果需要还可以对内存块数据清零。
span没有空间怎么分配对象
span内的所有内存块都被占用时,没有剩余空间继续分配对象,mcache会向mcentral申请1个span,mcache拿到span后继续分配对象。
mcentral向mcache提供span
mcentral和mcache一样,都是0~133这134个span class级别,但每个级别都保存了2个span list,即2个span链表:
nonempty:这个链表里的span,所有span都至少有1个空闲的对象空间。这些span是mcache释放span时加入到该链表的。empty:这个链表里的span,所有的span都不确定里面是否有空闲的对象空间。当一个span交给mcache的时候,就会加入到empty链表。
这2个东西名称一直有点绕,建议直接把empty理解为没有对象空间就好了。
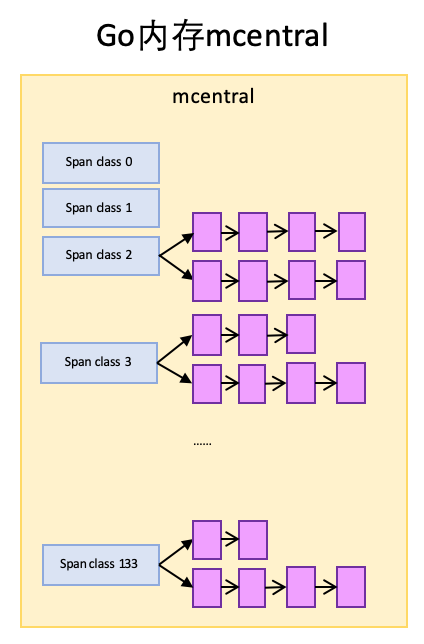
实际代码中每1个span class对应1个mcentral,图里把所有mcentral抽象成1个整体了。
mcache向mcentral要span时,mcentral会先从nonempty搜索满足条件的span,如果没有找到再从emtpy搜索满足条件的span,然后把找到的span交给mcache。
mheap的span管理
mheap里保存了2棵二叉排序树,按span的page数量进行排序:
free:free中保存的span是空闲并且非垃圾回收的span。scav:scav中保存的是空闲并且已经垃圾回收的span。
如果是垃圾回收导致的span释放,span会被加入到scav,否则加入到free,比如刚从OS申请的的内存也组成的Span。
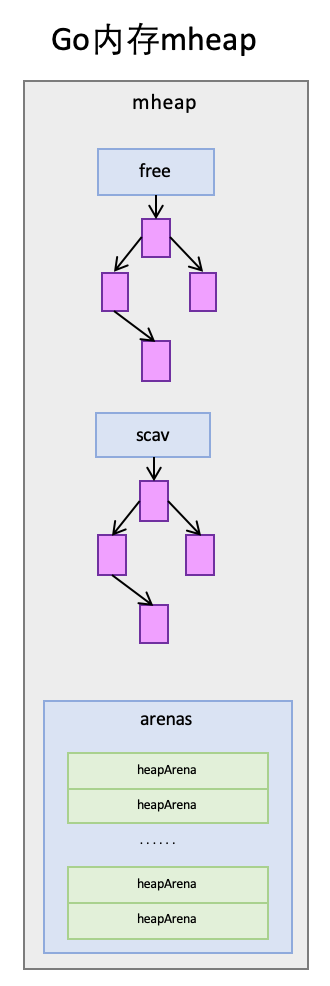
mheap中还有arenas,有一组heapArena组成,每一个heapArena都包含了连续的pagesPerArena个span,这个主要是为mheap管理span和垃圾回收服务。
mheap本身是一个全局变量,它其中的数据,也都是从OS直接申请来的内存,并不在mheap所管理的那部分内存内。
mcentral向mheap要span
mcentral向mcache提供span时,如果emtpy里也没有符合条件的span,mcentral会向mheap申请span。
mcentral需要向mheap提供需要的内存页数和span class级别,然后它优先从free中搜索可用的span,如果没有找到,会从scav中搜索可用的span,如果还没有找到,它会向OS申请内存,再重新搜索2棵树,必然能找到span。如果找到的span比需求的span大,则把span进行分割成2个span,其中1个刚好是需求大小,把剩下的span再加入到free中去,然后设置需求span的基本信息,然后交给mcentral。
mheap向OS申请内存
当mheap没有足够的内存时,mheap会向OS申请内存,把申请的内存页保存到span,然后把span插入到free树 。
在32位系统上,mheap还会预留一部分空间,当mheap没有空间时,先从预留空间申请,如果预留空间内存也没有了,才向OS申请。
大对象分配
大对象的分配比小对象省事多了,99%的流程与mcentral向mheap申请内存的相同,所以不重复介绍了,不同的一点在于mheap会记录一点大对象的统计信息,见mheap.alloc_m()。
Go垃圾回收和内存释放
如果只申请和分配内存,内存终将枯竭,Go使用垃圾回收收集不再使用的span,调用mspan.scavenge()把span释放给OS(并非真释放,只是告诉OS这片内存的信息无用了,如果你需要的话,收回去好了),然后交给mheap,mheap对span进行span的合并,把合并后的span加入scav树中,等待再分配内存时,由mheap进行内存再分配,Go垃圾回收也是一个很强的主题,计划后面单独写一篇文章介绍。
现在我们关注一下,Go程序是怎么把内存释放给操作系统的?
释放内存的函数是sysUnused,它会被mspan.scavenge()调用:
1 | // MAC下的实现 |
注释说_MADV_FREE_REUSABLE与MADV_FREE的功能类似,它的功能是给内核提供一个建议:这个内存地址区间的内存已经不再使用,可以回收。但内核是否回收,以及什么时候回收,这就是内核的事情了。如果内核真把这片内存回收了,当Go程序再使用这个地址时,内核会重新进行虚拟地址到物理地址的映射。所以在内存充足的情况下,内核也没有必要立刻回收内存。
4. Go栈内存
最后提一下栈内存。从一个宏观的角度看,内存管理不应当只有堆,也应当有栈。
每个goroutine都有自己的栈,栈的初始大小是2KB,100万的goroutine会占用2G,但goroutine的栈会在2KB不够用时自动扩容,当扩容为4KB的时候,百万goroutine会占用4GB。
关于goroutine栈内存管理,有篇很好的文章,饿了么框架技术部的专栏文章:《聊一聊goroutine stack》,把里面的一段内容摘录下,你感受下:
可以看到在rpc调用(grpc invoke)时,栈会发生扩容(runtime.morestack),也就意味着在读写routine内的任何rpc调用都会导致栈扩容, 占用的内存空间会扩大为原来的两倍,4kB的栈会变为8kB,100w的连接的内存占用会从8G扩大为16G(全双工,不考虑其他开销),这简直是噩梦。
另外,再推荐一篇曹大翻译的一篇汇编入门文章,里面也介绍了扩栈:第一章: Go 汇编入门 ,顺便入门一下汇编。
5. 总结
内存分配原理就不再回顾了,强调2个重要的思想:
- 使用缓存提高效率。在存储的整个体系中到处可见缓存的思想,Go内存分配和管理也使用了缓存,利用缓存一是减少了系统调用的次数,二是降低了锁的粒度,减少加锁的次数,从这2点提高了内存管理效率。
- 以空间换时间,提高内存管理效率。空间换时间是一种常用的性能优化思想,这种思想其实非常普遍,比如Hash、Map、二叉排序树等数据结构的本质就是空间换时间,在数据库中也很常见,比如数据库索引、索引视图和数据缓存等,再如Redis等缓存数据库也是空间换时间的思想。
6. 参考资料
除了文章中已经推荐的文章,再推荐几篇值得读的文章:
- 全成的内存分配文章,有不少帮助:https://juejin.im/post/5c888a79e51d456ed11955a8#heading-5
- 异常详细的源码分析文章,看完这篇我就不想写源码分析的文章了:https://www.cnblogs.com/zkweb/p/7880099.html
- 从硬件讲起的一篇文章,也是有点意思:https://www.infoq.cn/article/IEhRLwmmIM7-11RYaLHR
- 这篇文章的总流程图很棒:http://media.newbmiao.com/blog/malloc.png
7. 彩蛋
在查阅资料时,多篇文章都提到了这本书《The Linux Programming Interface》,关于Thread Cache有兴趣去读一下本书第31章。
- 如果这篇文章对你有帮助,不妨关注下我的Github,有文章会收到通知。
- 本文作者:大彬
- 如果喜欢本文,随意转载,但请保留此原文链接:http://lessisbetter.site/2019/07/06/go-memory-allocation/
